Hi all,
Sorry if this was answered before, but after searching the forum for 1/2h I can’t find it:
How do we set the take-off altitude for each flight?
The case in question is this:
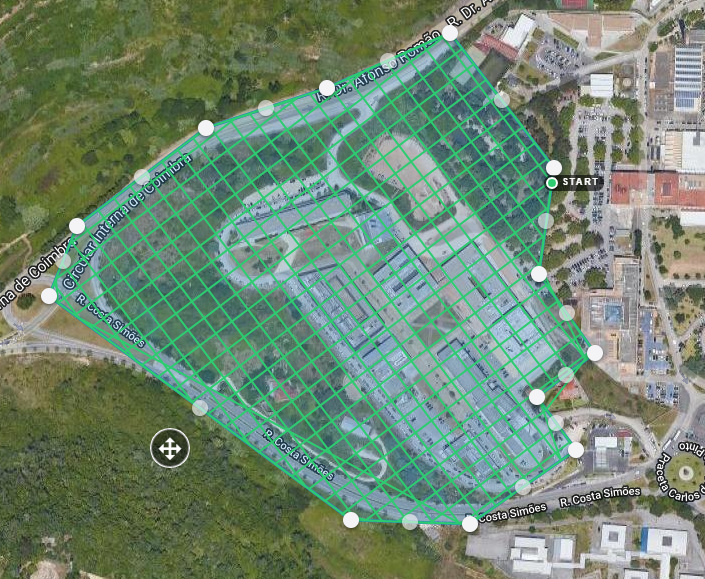
I have a reasonably large area to map in 3D (14 hectares), with large buildings which are about 20 meters high, and the ground slope also adds some 15 meters in some points (actually it takes, since it’s lower ground).
The rules of drone flight here in Portugal mandate that we always have visual sight on the drone (VLOS), which is not a problem since I plan to take-off from the top of the tallest building (~25m).
When planning the flight and based on some experiments I want to put around 50 m vertical distance from the rooftops to the drone, meaning 75m flight are set, and overlaps optimized by “Overlap Optimizer” already.
The problem:
If I take-off at 75m altitude from the rooftop, the drone will fly at 100m, making all the math for overlap, grid and distances nonsense.
I I take-off from the ground, I get the altitude correct, but I loose too much time and effort going to the rooftop at each battery swap, and I need to do at least 4 swaps… over an hour flying, it’s just not practical.
What is the best practice you guys follow/recommend for such cases?
Is there a hidden option somewhere where we can preset the take-off altitude?
Thanks in advance for your kind help,
-jprates